一、什么是光学系统的色差
光学系统中的色差是由于不同波长的光在通过透镜或光学系统时发生不同程度的折射而引起的现象。简单来说,色差是由于光的色散效应引起的,使得不同颜色的光不能在同一点上聚焦,从而导致图像模糊和颜色边缘现象。
光学系统中的主要色差可以分为两类:轴向色差(或称沿轴色差)和横向色差(或称倍率色散)。轴向色差是由于不同波长的光在通过透镜时沿光轴方向聚焦在不同位置所引起的。横向色差则是由于不同波长的光在通过透镜时在垂直于光轴的方向上产生不同的偏离而引起的。
一般来说,两种色差均与光学系统的单色像差有关,它们分别具有以下几种特性,我们可以用一个单透镜进行验证:

轴向色差:
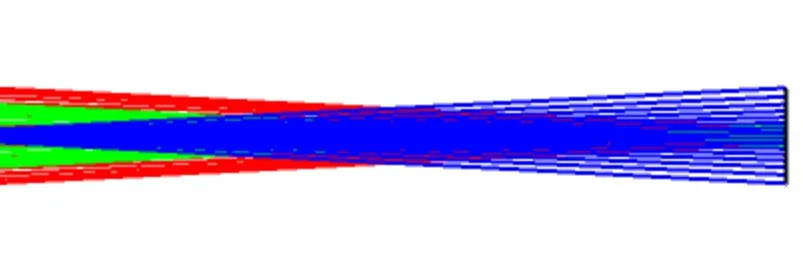
焦点位置变化:轴向色差是由于不同波长的光在通过透镜后,焦点位置在光轴方向上出现变化。也就是说,蓝光、绿光和红光等不同波长的光线不能在同一点聚焦,而是在光轴上形成不同的焦点位置。
颜色边缘:在成像中,轴向色差会导致图像的不同部分出现颜色边缘。例如,白色物体的边缘可能会出现蓝色或红色的晕圈,这取决于哪个波长的光最先或最后聚焦。
与波长相关:轴向色差的程度与光的波长直接相关。
横向色差:
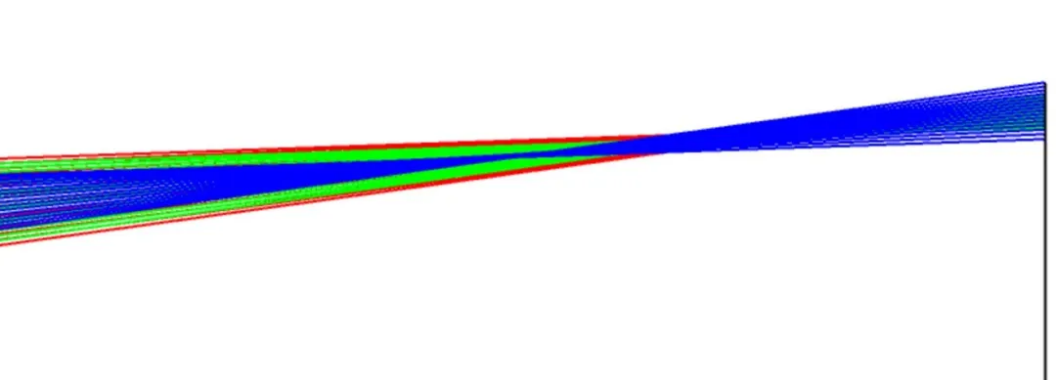
像面上的颜色位移:横向色差是由于不同波长的光在通过透镜后,在垂直于光轴的方向上偏离不同。也就是说,不同颜色的光线在像面上会形成像高不同的像点。
像差特性:和彗差以及畸变一样,严格对称的光学系统可以矫正横向色差。
光轴外的效应:横向色差主要影响的是光轴以外的成像区域。在中心位置的影响较小,但在图像边缘区域会更明显。
在经典光学设计理论中,我们利用F、d、C三种单色光去描述色差,则轴向色差可以近似表示为:
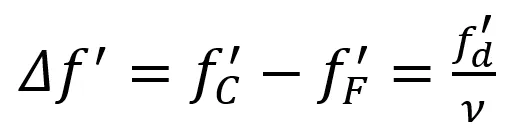
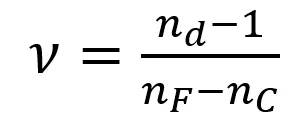
其中,Δf是焦距的变化,f是系统对应单个波长的焦距,V是阿贝数,nF和nC分别是蓝光和红光的折射率。其中,阿贝数的定义为:
二、色差的计算及校正方法
在光学设计中,校正色差是一项重要的任务。为了校正轴向色差,通常采用不同材料的透镜组合,以达到消色差的效果。例如,使用高色散玻璃和低色散玻璃组合成的消色差透镜(achromatic lens)可以有效地校正轴向色差。假设双胶合透镜的总光焦度和材料已知,我们就可以利用下面的公式求出两个透镜的光焦度。双胶合透镜同时有三个表面,我们可以假设最后一个表面是平面,这样我们就能根据光焦度和曲率半径的公式求出其他两个面的曲率半径。
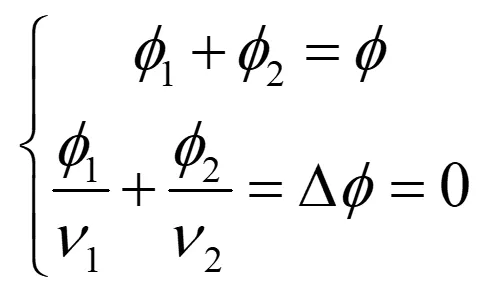
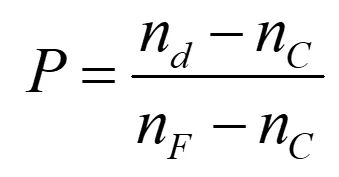
需要指出的是,上面的公式是根据阿贝数计算的,及矫正的结果是是F和C光对应的焦点位置相同,如何进一步矫正色差,及矫正二级光谱呢,我们可以在上面的公式里面再加一个变量,即把双胶合透镜改成三胶合。首先我们仿照阿贝数的定义,重新定义一个和色散有关的系数P:
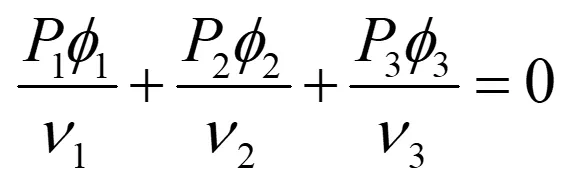
此时若要使F、d、C光对应的焦点位置一致,则三胶合透镜的三个组成部分光焦度需满足:
三、计算实例
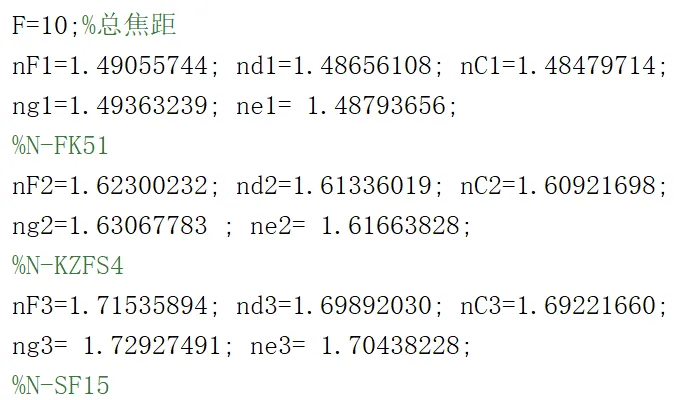
还是举一个具体的例子来说明上面公示的用法,假设我们要设计一个焦距为10mm的复消色差三胶合透镜,所用的材料为N-FK51、N-KZFS4、N-SF15,我们首先可以查出这三种材料在不同波长位置的折射率数值。
我们首先计算出全部的阿贝数和参数P的数值,然后根据色差矫正公式可以完成全部的光焦度分配(这里的公式推导可以查阅相关参考文献,我就不展开说了):
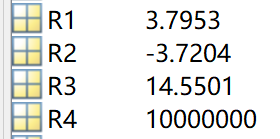
三胶合透镜一共四个表面,现在三个光焦度已知,则我们可以给定其中一个表面的曲率半径,根据光焦度和曲率半径的关系,确定所有表面的参数:
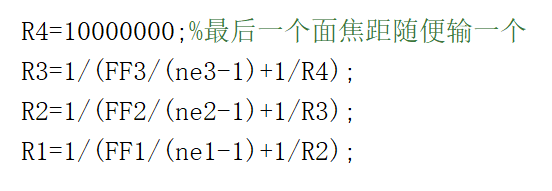
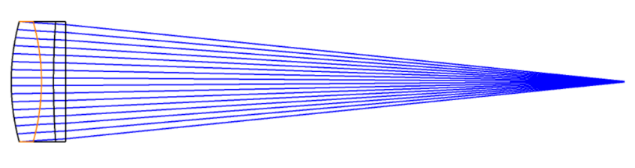
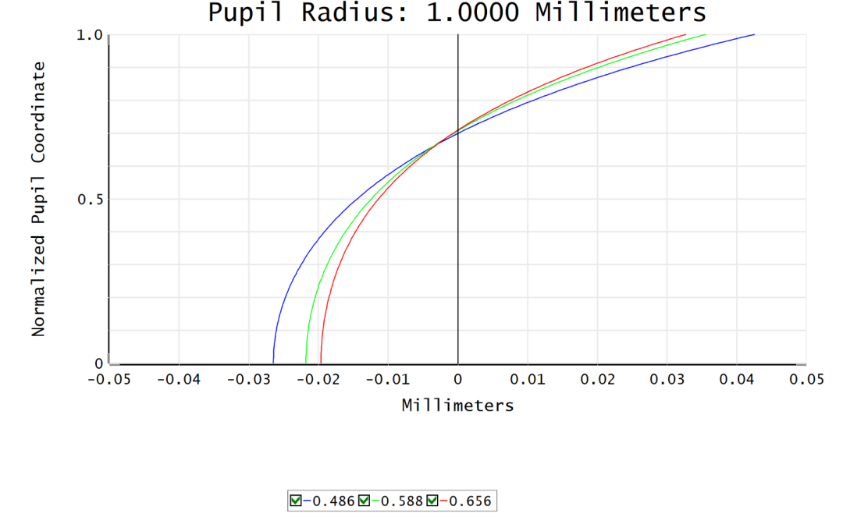
得到其他几个面的曲率半径,之后我们把这些参数输入到Zemax中看一下结果:
四、总结
在光学系统中,色差是由于光的不同波长在透镜中发生不同程度的折射而引起的。色差分为轴向色差和横向色差,前者导致焦点位置在光轴方向上的变化,后者导致像面上不同颜色的光线位置不同。通过了解和计算色差,我们可以采取各种校正方法来提高光学系统的成像质量。
在色差的校正中,消色差透镜是一种常用的解决方案。通过选择合适的玻璃材料并进行精确的计算,可以设计出有效校正色差的透镜组合。具体到双胶合透镜,通过确定材料的折射率和色散常数,利用相应的公式进行计算和优化,可以显著减少轴向和横向色差,得到高质量的光学成像系统。
在实际设计中,以焦距为10mm的复消色差三胶合透镜为例,我们通过查找材料的折射率数值,计算阿贝数和相关参数,并利用光焦度分配公式进行详细计算,最终得到透镜的曲率半径参数。通过将这些参数输入光学设计软件(如Zemax),我们可以验证设计结果,并进一步优化透镜的性能。
参考代码:
clear all
F=10;%总焦距
nF1=1.49055744; nd1=1.48656108; nC1=1.48479714;
ng1=1.49363239; ne1= 1.48793656;
%N-FK51
nF2=1.62300232; nd2=1.61336019; nC2=1.60921698;
ng2=1.63067783 ; ne2= 1.61663828;
%N-KZFS4
nF3=1.71535894; nd3=1.69892030; nC3=1.69221660;
ng3= 1.72927491; ne3= 1.70438228;
%N-SF15
FF=1/F;
P1=(nd1-nC1)/(nF1-nC1);
P2=(nd2-nC2)/(nF2-nC2);
P3=(nd3-nC3)/(nF3-nC3);
v1=(nd1-1)/(nF1-nC1)
v2=(nd2-1)/(nF2-nC2)
v3=(nd3-1)/(nF3-nC3)
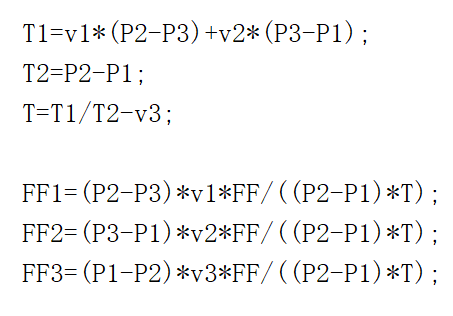
T1=v1*(P2-P3)+v2*(P3-P1);
T2=P2-P1;
T=T1/T2-v3;
FF1=(P2-P3)*v1*FF/((P2-P1)*T);
FF2=(P3-P1)*v2*FF/((P2-P1)*T);
FF3=(P1-P2)*v3*FF/((P2-P1)*T);
FF1
FF2
FF3
R4=10000000;%最后一个面焦距随便输一个
R3=1/(FF3/(ne3-1)+1/R4);
R2=1/(FF2/(ne2-1)+1/R3);
R1=1/(FF1/(ne1-1)+1/R2);
R1
R2
R3
参考文献
Kingslake, R., & Johnson, R. B. (2010). Lens Design Fundamentals. Elsevier Inc.