在光学设计领域,显微物镜的设计一直是极具挑战性的课题。它不仅需要精确的光学性能,还要满足复杂的物理和工程要求。
今年,一个备受瞩目的光学设计知名比赛已经落下帷幕,本文将通过这个案例进行复盘,重点展示显微物镜指标论证方法和设计思路。我们将从指标要求、指标分解、设计思路三个方面展开,深入探讨如何从需求出发,逐步构建出满足要求的光学系统。
同时,如果您目前有求职招聘需求,不妨持续关注我们的“之晓光学招聘”(见文末),那里将持续发布行业信息汇总及相关咨询,相信会对各位有所帮助。
一、指标要求
在进行一个光学系统设计时,首先需要明确技术指标,可以说没有指标,项目验收条件,测试方法,成本与周期,风险管理,项目管理,包括合同内容等根本无从谈起。虽然很多时候甲方的需求比较模糊,但通过讨论,我们也还是可以把需求对应在具体的光学指标上。
本文案例中,指标由上级直接指定,具体要求如表1-1所示。
表1-1 设计指标要求
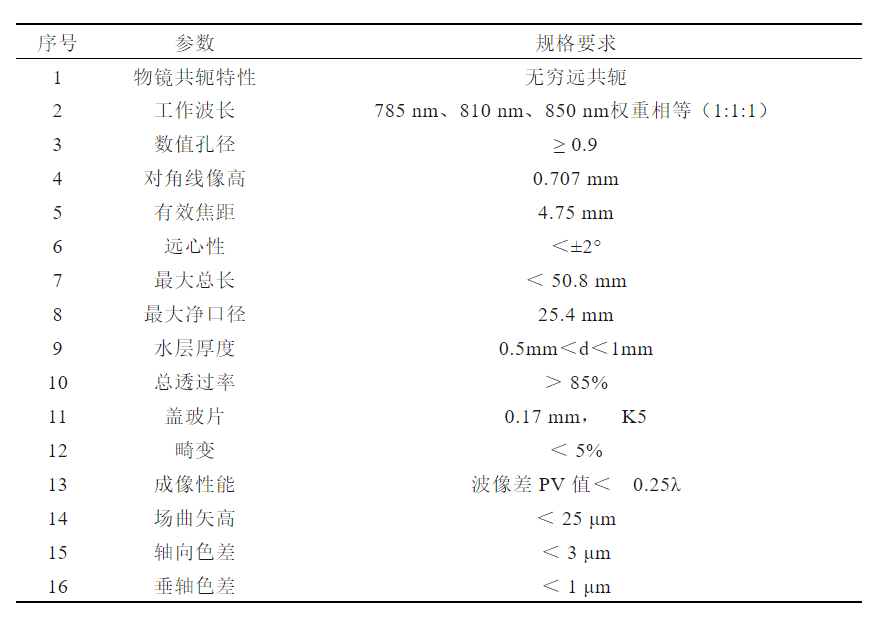
拿到光学设计指标后,我们不能直接开始进行设计,首先应该对指标进行核验,确保实际可实施性,同时也给后续优化设计提供指导。
二、指标分解
光学设计的很多指标是从应用的角度提的,在设计之前我们需要把一些指标对应在具体的外部参数上,包括口径,视场,波段等。对于显微系统,需要考虑倒置设计的影响,涉及到放大倍率等的选取和计算。
1.波段的选取
影响波段选取的是物方光源特性和目标特性,例如物方被LED照明,则对应的波段即为三色LED的发光波长;例如在天文观测中,采用的波段通常和目标的辐射特性有关,有时甚至需要搭配窄带滤光片使用。
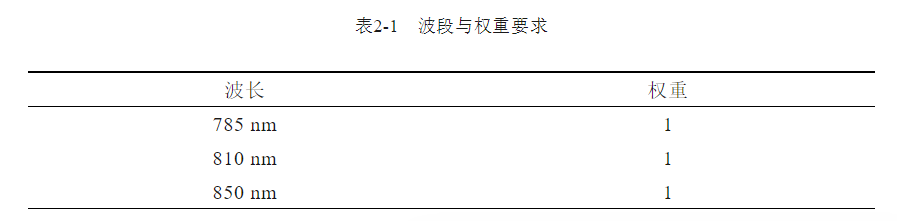
波段范围通常可以直接由总体确定,根据光学设计给定指标要求,本系统的波长与其权重选取如表2-1所示:
2. 口径的计算
不同类型光学系统对于口径的表示方式不同,对于显微系统,我们主要考虑的是物方的数值孔径NA。根据光学设计赛道本赛题细则要求,本系统的口径为:NA≥ 0.9
考虑到优化效果及设计速度,本系统采取倒置设计的方法,所以口径的表征参数需要由NA变为F数。下面根据NA与F数的对应关系进行计算:
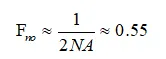
计算得到系统在倒置设计时口径为F/0.55。
3. 视场的确定
根据光学设计指标要求,本系统的对角线全高0.707mm,也即在倒置设计中,设置半像高为0.3535mm。
同样出于优化速度的考虑,视场的表征参数由像高变为视场角,其转换关系如下:
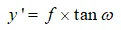
计算出:

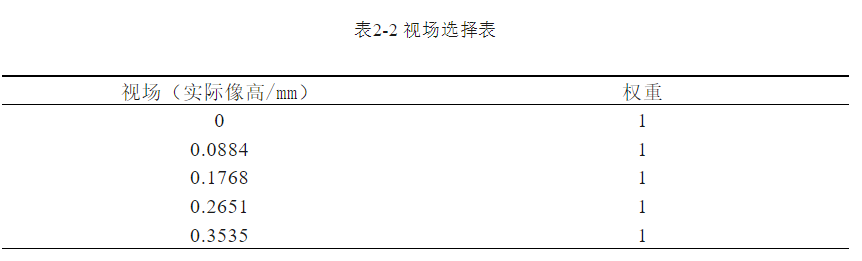
在初步优化之后需要重新将视场设置为0.3535mm半高,进行更准确的优化。表2-2是用像高表征的视场选择表:
4.焦距的确定
本系统为无限共轭距显微物镜,则对于该系统,放大倍率直接和物镜焦距有关,根据定义,无限共轭距显微系统的放大倍率为TubeLens的焦距比物镜焦距,假设管镜焦距190mm,指标中要求的焦距为4.75mm,则放大倍率为40倍。
5. 初始参数计算汇总
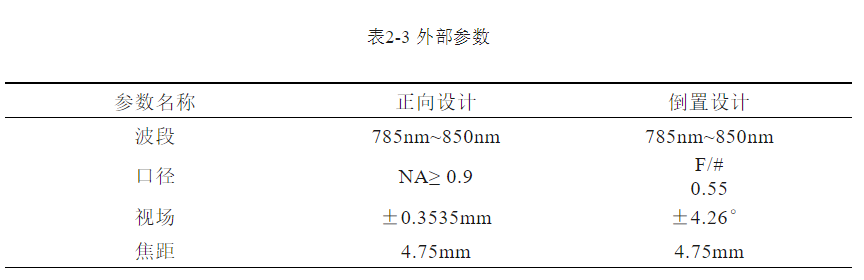
经过上述计算,本系统的外部参数如表2-3所示:
三、设计思路
1.光学系统初始结构选择
光学系统初始结构的确定主要采用以下三种方法:
(1)计算法:基于像差理论,通过解析计算求解初始结构参数。比较经典的算法有蔡司公司发明、前苏联改进的PWC法。该方法计算过程较为复杂,通常仅适用于结构简单的光学系统,在现代光学设计中应用较少。
(2)专利检索法:通过查阅公开的光学镜头专利和文献资料,根据系统性能指标要求筛选合适的初始结构,再经过比例缩放和参数优化获得所需设计。该方法是目前最常用的初始结构获取方式。
(3)经验设计法:依托设计人员积累的工程经验,参考类似项目案例进行初始结构设计。这种方法对设计者的专业素养和实践经验要求较高,需要具备丰富的项目经验储备。
本系统采用查专利检索法与经验设计法相结合的方式,即先在已公开发表专利筛选出与本系统外部参数相近的镜头作为初始结构,再根据设计者的经验对镜头的架构做出合适的修改,以符合赛题指标的要求。
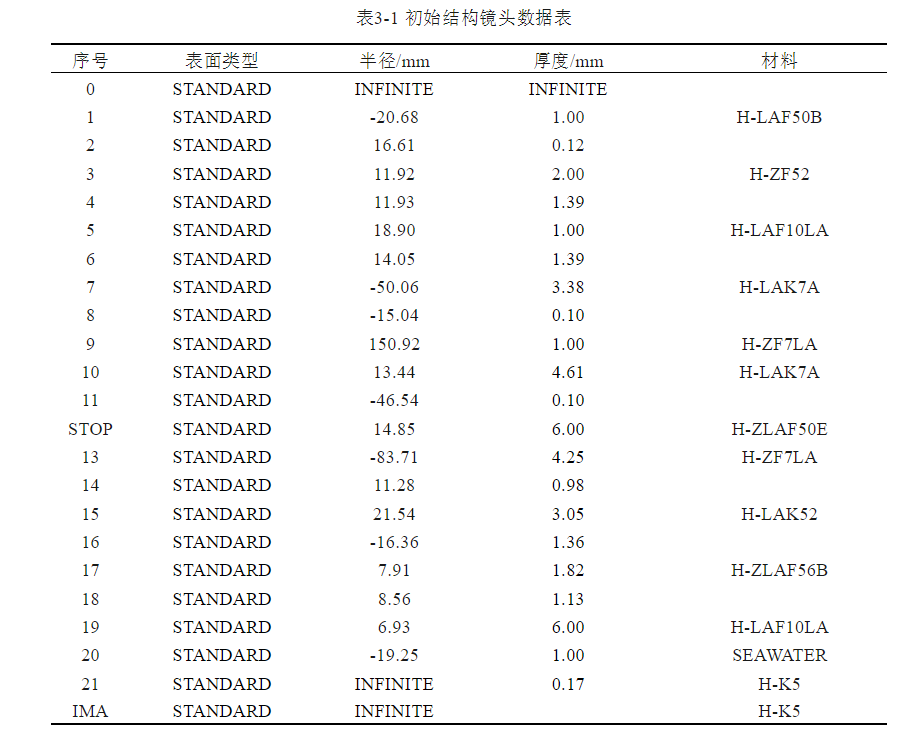
在分析赛题指标要求并筛选相关专利后,确定了一款11片玻璃全球面显微物镜专利作为本文初始结构参考。作为参考的初始结构并非是浸没物镜,需要人工将其改为水浸,但好在并不会导致镜头质量出现不可逆转的退化。调整时注意,根据比赛官方问答表建议,将水层设置为SEAWATER,将盖玻片和盖玻片后的材料均设置为H-K5材料。
调整为水浸物镜的镜头数据如表3-1所示,镜头二维图如图3-1所示。
本文选取的初始结构存在以下问题,在初步优化时需要解决:
(1)参数问题:四个外部参数需调整为本系统要求的参数;
(2)片数问题:本系统片数为11片,镜片数目过多,需要减少;
(3)架构问题:本系统的镜头架构有问题,不利于平衡像差,后续将调整为先向内束腰再发散最后聚焦的“鱼”形架构。
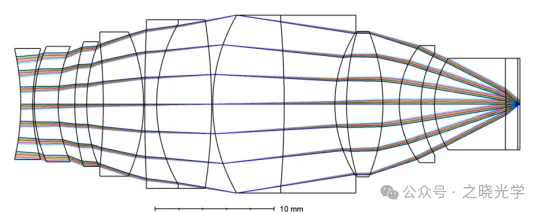
图3-1 初始结构镜头二维图
2. 初始结构的初步优化
1) 初步优化思路与基本数据
由于选取的初始结构的参数与本赛题要求的参数相近,经过比例缩放和参数优化后,系统外部参数指标满足设计要求。其中注意保持盖玻片厚度为0.17mm,水层厚度为0.5mm~1mm。
对于架构问题,首先要对孔径光阑的位置做优化调整。初始结构将光阑置于第七透镜的第一表面,形成前组6片、后组5片的配置。从经验角度出发,我们希望将光阑放在更靠左的位置,采用前组3~4片、后组5~6片的“鱼”形结构设计,以达到更好的像差平衡效果。前组负责光线的会聚与发散转换,后组完成光束的最终聚焦。这种架构已被多家国际知名光学厂商广泛应用于高性能显微物镜设计中。
关于透镜片数的优化,通过系统分析,确定8~9片的配置方案最为合理。本文采取的具体的减片优化策略包括:删除光焦度贡献较小的透镜;将胶合透镜组简化为单片透镜;对相邻透镜进行胶合处理后简化为单片。具体优化思路如图3-2所示。
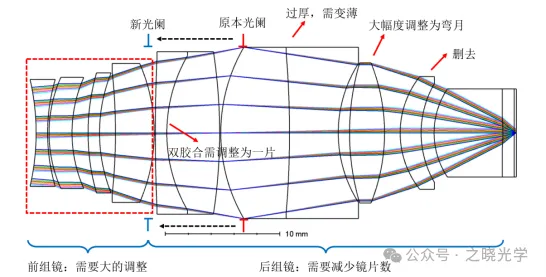
图3-2 初始结构优化思路示意图
初步优化是比较大幅度的架构调整,通常需要经过多轮迭代的局部优化、锤形优化与手动调整。其中需重点关注的优化策略为:
(1)在设定优化边界条件时,初期尽可能不要设置过多约束;
(2)优化过程中,出现问题再解决问题,假如某个环节偏离预期则回退一步,重新设定约束,切忌对未出现的问题设置约束,这样会无端错失很多优良镜头解;
(3)在做锤形优化寻找最优解时,对尺寸边界条件的约束要提前设置好,锤形优化过程往往需要较长时间,通常是过夜优化,因此在未设置完整包装边界的情况下,自动优化程序极大概率寻找到不符合要求的解;
(4)在锤形优化替换玻璃时,要开启玻璃替换模板,避免出现停产或废弃玻璃。注意玻璃库要使用赛方提供的玻璃库。
(5)在优化过程中,仅保留关键操作数,确保光学系统在优化时,光学性能保持稳定。若优化效率显著下降,可以轮换使用波前像差、光斑半径优化与对比度优化提升效率。
(6)当优化效果趋于停滞时,表明系统可能已陷入最小二乘法的局部极小值,此时需要引入人工干预以进一步优化,通过查看像差曲线图,分析是哪种像差阻碍了镜头的优化速度;
(7)常用的干预手段包括手动调整不合理的镜片材料,翻转镜片或镜片组,将承担光焦度较大的透镜分裂为两片,或利用Zemax和CodeV两软件优化算法不同的特点,两个软件交替优化,以跳出局部最优解。
经过优化后的镜头二维图如图3-3~图3-4所示。
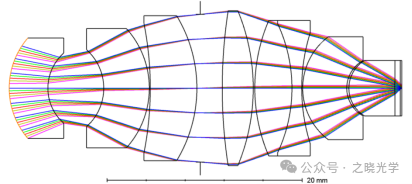
图3-3 优化设计结果
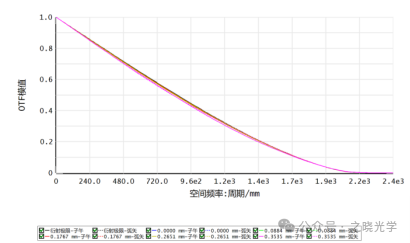
图3-4 优化设计结果MTF曲线情况
四、总结
通过上述对显微物镜设计的详细复盘,我们从指标要求的明确,到指标分解的细致分析,再到设计思路的逐步展开,展示了如何系统地设计一个满足复杂要求的光学系统。在这个过程中,我们不仅解决了实际的技术难题,还积累了宝贵的设计经验。