遥感技术,特别是搭载于高空平台的可见光遥感相机,已成为现代地面监测体系中不可或缺的核心组成部分。其应用范围广泛,涵盖了从地理测绘、灾害预警、环境监测到军事侦察和公共安全等多个关键领域。通过从高空获取地表的高分辨率图像,遥感相机能够实时、大范围地捕捉地面目标的动态信息,为决策者提供至关重要的情报支持。
在遥感相机的设计过程中,最核心的指标便是分辨率。在总体论证阶段,我们就需要根据平台类型,功能目标确定相机的波段和物方分辨率要求,从而确定光学系统的口径。一般认为,镜头的加工装配成本和综合工程难度随口径的三次方成正比,该指标直接影响了后续设计的各个环节。
本文将针对一个具体例子,向大家阐述光学系统的口径是如何确定的,并且将给出一个计算过程,希望能对大家有所帮助,看到最后,你可能会发现这件事没有那么简单~
一、景深背后原理
在遥感相机系统的设计与评估中,物方分辨率(又叫地面分辨率,通常单位为米) 是衡量性能的核心指标。物方分辨率直接定义了相机能够分辨地面最小细节的能力,是决定图像信息丰富程度的关键。一个更高的物方分辨率意味着能够识别更小的地面目标,例如从区分车辆类型到识别人员活动。而实现高物方分辨率的核心在于光学系统的设计,其中,望远镜的口径(D) 是决定其理论分辨率极限的根本因素。根据瑞利判据,望远镜的角分辨率与口径成反比,进而决定了其在特定高度下能够实现的物方分辨率。
瑞利判据(Rayleigh Criterion)是光学中用于判断物方两个点在衍射作用下能否被光学系统分辨的最常用标准。它指出,当一个点光源的衍射图样的中央极大值与另一个点光源的衍射图样的第一极小值重合时,这两个点光源恰好可以被分辨。对于一个圆形孔径的望远镜,其角分辨率(Angular Resolution) θ 可以通过以下公式计算:

必须强调的是θ是物方的角分辨率,如果要和地面的分辨率对应(也就是物方的空间频率),我们需要根据两点的间距S和轨道高度H换算一下。
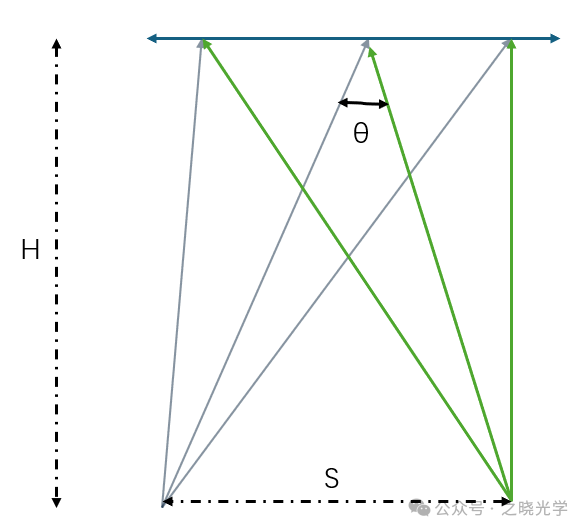
物方分辨率S指的是在垂直于观测方向的地面平面上,能够被分辨的最小线性距离。它与角分辨率θ和观测平台的高度H之间存在一个简单的几何关系:
极限分辨角θ通常是一个比较小的值,如果用弧度制表示,则有:
代入瑞利判据公式,此时有:
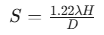
上式描述了理想情况下,光学系统分辨率目标与高度,波长,以及口径(入瞳直径,大家可以想一想为什么是入瞳)的关系。举一个简单的例子,我们用代码写一下上面这个简单的公式:
计算代码
% 参数定义
lambda = 550e-9; % 波长,单位:米 (550 nm)
H = 30000; % 平台高度,单位:米 (30 km)
% 分辨率要求
S= 1; % 分辨率要求,单位:米
% 计算理想条件下所需口径
D_ideal = (1.22 * lambda * H) / S;
% 显示结果
fprintf('理想条件下,分辨 %d 米目标所需的望远镜口径为:%.2f 毫米\n', S, D_ideal * 1000);
二、案例说明
为了方便大家理解,这里我举一个简单的例子,假设现在总体给我们一个任务需求,我们的遥感相机在三万米高空垂直向下拍摄,中心波长为500nm,要求我们分别计算一下看到一个4米长的汽车,和看到一个0.3米长度的人员,需要多大的口径,我们可以把上面的代码稍微改一下:
计算模块
% 参数定义
lambda = 500e-9; % 波长,单位:米 (500 nm)
H = 30000; % 平台高度,单位:米 (30 km)
% 分辨率要求
S_car = 4; % 汽车分辨率要求,单位:米
S_person = 0.3; % 人员分辨率要求,单位:米
% 计算理想条件下所需口径
D_car_ideal = (1.22 * lambda * H) / S_car;
D_person_ideal = (1.22 * lambda * H) / S_person;
% 显示结果
fprintf('理想条件下,分辨 %d 米目标所需的望远镜口径为:%.2f 毫米\n', S_car, D_car_ideal * 1000);
fprintf('理想条件下,分辨 %.1f 米目标所需的望远镜口径为:%.2f 毫米\n', S_person, D_person_ideal * 1000);
输出结果
理想条件下,分辨 4 米目标所需的望远镜口径为:4.58 毫米
理想条件下,分辨 0.3 米目标所需的望远镜口径为:61.00 毫米
三、更复杂的情况
在理想条件下我们可以按照上面的公式简单计算,但是实际光学系统的成像质量还会受到环境的影响,其中比较大的影响因素是气象条件。
简单来说,如果还是遥感相机在三万米高空垂直向下拍摄,但是相机工作的下方正在下雨,或者有严重的雾霾,我们就没有办法拍到清晰的照片了。
即使我们不在不好的天气执行任务,今天是晴天,如果下方大气存在大风,大气湍流也会对波前造成明显影响。这方面已经有不少国内外专家学者进行研究,一种通用的方法是,针对大气湍流,我们可以对湍流引入的影响进行量化计算。
为了量化大气湍流对光学系统的影响,引入了大气相干长度(Atmospheric Coherence Length) ,通常用r0表示。r0 是一个等效参数,它代表了在特定大气条件下,一个圆形孔径的衍射极限角分辨率恰好等于大气湍流引起的视宁度(Seeing)角分辨率。
简单来说,当光学系统的口径大于这个参数时,成像分辨率不随口径的增大而提高。该参数可以表示为下式:
其中k是波数,L为光程,C是一个与光学系统高度有关的参数,通常情况下,高度z对C的影响非常大,而且离地面越近影响越大。在中高轨卫星中,一般大气湍流的影响不大,而对于飞机,高空气球等平台,湍流的影响往往是不可忽略,甚至占主导的。
例如,一个相机距离地面3km(云层下方),可能阴天时比晴天会有更好的成像质量,这是因为阴天时往往气流比较稳定,而晴天时反而可能会有不规则的湍流。
针对这个问题的具体推导,计算和分析比较复杂,如果大家感兴趣,我会进一步给大家讲讲。